Историю роботов и автоматов см. в ТрВ-Наука №№ 330, 332, 334, 336, 339, 353, 354, 356, 358, 359, 361–364 (trv-science.ru/tag/istoriya-robotov)

1967 год, страной Советов руководит молодой и довольно энергичный генеральный секретарь Леонид Брежнев, межпланетная станция «Венера-4» достигла второй планеты от Солнца, а межпланетная станция «Луна-12» добралась до естественного спутника Земли. Страна готовится отметить полувековой юбилей Великой Социалистической Октябрьской революции. Совсем недавно стартовала восьмая пятилетка. Благосостояние советских граждан быстро улучшается, технический прогресс движется семимильными шагами, большинство семей получило возможность приобрести холодильники, телевизоры, стиральные машины, радиоприемники и… роботов! Фантастика? Альтернативная реальность? Совсем немного.
Годом раньше один из главных научно-популярных журналов СССР «Техника — молодежи» в майском номере за 1966 год объявил конкурс на лучшую конструкцию человекоподобного робота. Главным призом конкурса стал мотоцикл!
Времени на создание роботов было дано совсем немного — чуть больше года. Итоги подвели уже летом 1967-го, когда в фойе Дворца культуры Автозавода имени Лихачёва состоялось награждение, на котором начинающая певица Алла Пугачёва спела песню «Робот», — фотографии с этого мероприятия и отчет о его проведении были опубликованы в августовском номере журнала 1967 года. Конкурс был заочный и вызвал огромный интерес во всех уголках страны, однако при внимательном рассмотрении представленных работ нетрудно заметить, что роботов в СССР проектировали и создавали задолго до объявления конкурса.
Так, в 1963 году в Калининградском профессионально-техническом училище (ГПТУ) № 9 группа энтузиастов под руководством преподавателя электросвязи Бориса Николаевича Василенко собрала «железного человека» высотой 210 см и весом около 200 кг, который напоминал космонавта в скафандре из-за своего водолазного шлема. Однако, несмотря на внушительные габариты, робот был способен передвигаться со скоростью от двух до пяти километров в час. Железный колосс «видел» (фотореле), «слышал» звуки (микрофоны) и «ощущал» тепло (термоэлементы), а также мог предупреждать об опасности (счетчик для определения радиоактивности). А с помощью сложной системы контактов и звуколокатора, работающего по принципу отражения звуковых колебаний от окружающих предметов, робот замечал препятствия и ловко их обходил. Робототехники-любители собрали своего «железного человека» буквально из всего, что смогли раздобыть у друзей и знакомых, трудящихся на разных заводах. Так, туловище робота изготовлено из списанных дюралюминиевых бензобаков от самолета, к которым привинчивался цилиндр для аккумулятора типа 12 АСАМ-28 (запаса его энергии хватало на восемь суток), а к верхней части «тела» крепился шлем и электронные манипуляторы, предназначенные для работы с радиоактивными материалами. Робот действовал не только по заранее заданному плану, им можно было дистанционно управлять по радио (в туловище человекоподобного робота были вмонтированы УКВ-радиолиния, состоящая из УКВ-передатчика и УКВ-приемника, которые через командное реле, установленное в магнитофоне, где на пленке умещались тысячи командно-управляющих импульсов, выдавали сигналы нужным исполнительным механизмам).
Нетрудно представить, как железный человек робототехников из ГПТУ № 9 движется по зараженной территории, а также используется для проведения разведывательных и поисково-спасательных операций, ведь подобных роботов только энтузиастами было собрано около десяти штук.
Кроме «железного человека», которому позже дадут звучное имя «Нептун», команда Бориса Василенко представила целую семью роботов, в которую входили радиоуправляемый «Андрюшка» (маленький робот, напоминающий по принципу действия современные радиоуправляемые игрушки) и другие металлические истуканы. За эту семью Василенко и стал победителем конкурса, получив заветный приз.
На конкурс были представлены и другие металлические гуманоиды. Среди них находился, например, настоящий робот-экскурсовод. В 1962 году в ознаменование 90-летнего юбилея Политехнического музея Москвы сотрудники опытной фабрики при обществе «Знание» конструктор Михаил Александров и художник Марк Горохов изготовили робота-экскурсовода, которого шутливо назвали «Сепулькой» в честь загадочных элементов цивилизации ардритов из «Звездных дневников Ийона Тихого» польского писателя-фантаста Станислава Лема.

180-сантиметровый электронный красавец представлял собой самоходную платформу, оборудованную блоками управления движением (БУД), приема речи, а также микрофоном и питанием. БУД состоял из приемника, подавителя помех, дешифратора и исполнительных реле, включающих моторы. Его трубообразная конструкция с шаром вместо головы и маленькими смешными колпаками, напоминавшими клоунские ботинки, под которыми находились колесики робота, умиляла посетителей музея. Поскольку робот был не только экскурсоводом, но и экспонатом, некоторые его части сделали прозрачными, чтобы сквозь них можно было видеть работу элементов схемы движителя. «Сепулька» был окрашен в белый и красный цвета, а некоторые детали выделялись золотистым. При включении у него вспыхивали ярко-зеленые глаза. В своих тоненьких «руках» робот держал микрофон, а на месте его рта был расположен динамик. Микрофон в руках «Сепульки» позволял задать экскурсоводу вопрос. Но отвечал на него сотрудник музея — по радиоканалу. Робот двигался строго по заданной траектории, а когда он останавливался у экспонатов, то получал команды на включения магнитофонной записи с текстом экскурсии. В наши дни «Сепулька» всё еще находится в коллекции Политехнического музея, правда над ним немного «пошаманили», заменив радиопульт на пульт с инфракрасным управлением.

На конкурс также были представлены роботы-тяжеловесы «Сибиряк-1» и «Сибиряк-2», которых изготовили сотрудники и учащиеся Омского городского училища (ГПТУ-2) для павильона «Профтехобразование» на ВДНХ. Роботы так же, как и «Сепулька», выполняли роли экскурсоводов. Сначала мастера изготовили «Сибиряка-1», весом 180 кг, электродвигатели которого через кулачки и рычаги приводили в движение механизмы «рук» и «ног». Через некоторое время был создан «Сибиряк-2», который мог быть не только экскурсоводом, но и продавцом лотерейных билетов и книг, был способен рекламировать товары и натирать паркет.
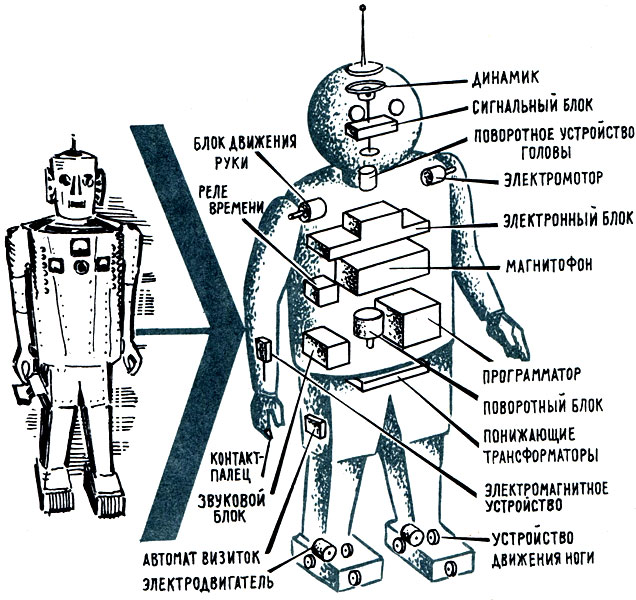
Робот состоял из девятнадцати блоков управления головы, правой руки, движения ног и поворота корпуса. Механический человек питался от сети; через звуковое реле на программатор поступал ток напряжением 27 В, затем он преобразовался в программные импульсы. Они позволяли управлять движением робота, а также подавать команды на остановку, например у экспоната, и включать магнитофон с записью речи. Правой рукой робот мог вытаскивать из импровизированного кармана билеты. Как только посетитель брал билет, пальцы смыкались, и поступала команда «возврат в нуль». В двигатели рук подавался ток, и робот возвращается в прежнее положение.
Другой уникальный робот, о котором стоит рассказать, умел играть в домино. С ним могли играть три человека: один партнер и два противника. Механический истукан по имени РИД (релейно-контактный) представлял собой считывающее устройство, в которое закладывались игровые кости. От него сигналы поступали в блок памяти. Для того, чтобы РИД мог распознать индекс кости, на лицевой стороне фишки были нанесены два дополнительных значка, которые совершенно не мешали игре.
Как известно, кости в игре могут ставиться с двух концов — спереди или сзади. Для обоих случаев в схеме робота были предусмотрены считывающие устройства. Они связывались с блоками памяти через компаратор (устройство сравнения), который контролировал поступающую информацию. С компаратора сигналы поступали в запоминающее устройство и устройство слежения. Последнее отслеживало, кто поставил на кон данную фишку. Перед началом игры это устройство настраивалось на «заходчика», а затем переключалось. Если ходил первый противник, то РИД «запоминал» индекс его кости. Причем фиксировалась только последняя цифра. Например, на кону стоит «четверка» и ставится кость «четыре-два». Запоминается так: первый противник поставил «двойку», и, следовательно, фишка «четыре-два» вышла. После этого устройство слежения переключается на партнера. Если игрок сыграл, то он должен был нажать на кнопку, расположенную на роботе. Так робот запоминал фишки, оставшиеся у него, и кости, которые поставили другие игроки. Потом ходил второй противник, а затем очередь наконец доходила до РИДа. Робот выяснял, есть ли у него кости, которыми можно сыграть, — если их было несколько, то он по особой программе выбирал одну из них, срабатывали электромагниты — и кости выкидывались.
Пустотелый робот был почти неподвижен, он сидел на тумбе, в которой был вмонтирован блок питания. Левая рука РИДа покоилась на столе, на ее съемной крышке были установлены считывающие устройства и кнопки. Под крышкой находились остальные блоки: компаратор, запоминающие устройства, устройство слежения, программатор. Правая рука прикрывала считывающее устройство. По команде программирующего блока электромагнит осуществлял резкий толчок в момент выброса кости. При этом создавалось впечатление, что фишку выбрасывает именно робот — пока рука не начинала двигаться обратно, кость находилась под ладонью.
Большое впечатление производили «глаза» РИДа. Они двигались по команде устройства слежения. Глаза светились лампочками (их было по три на каждом зрачке). После каждого хода игроков они попеременно загорались. Казалось, что робот смотрит на первого противника, потом на партнера, а затем на второго противника. Когда робот делал ход, он задумчиво мигал под воздействием импульс-реле.
РИДа сконструировали три школьника из Харькова — Виктор Кушнеревич, Пётр Обрезанов и Михаил Файнгольд — под руководством сотрудников Харьковского государственного научно-исследовательского института метрологии. В 1964 году РИД экспонировался на ВДНХ СССР. Из девяти партий, сыгранных там, робот выиграл пять. Конечно, РИДу было далеко до способностей, которые в будущем проявят нейросети, побеждая чемпионов мира по шахматам и го, однако его можно смело назвать их дедушкой.
Настоящую систему «умный дом» представил учитель черчения из Железнодорожного техникума города Калуги Борис Николаевич Гришин. Мастер собрал многофункционального робота, которого он назвал «автоматический робот-секретарь», или сокращено АРС. Гришин задумал создание робота задолго до начала конкурса, объявленного журналом «Техника — молодежи», — дело в том, что его мать была больна, а преподаватель не мог постоянно находиться с ней рядом, поэтому и спроектировал, а затем и изготовил робота, который помогал ухаживать за больной.

Возможности робота поражают даже с высоты сегодняшнего дня. АРС мог отвечать на телефонные звонки и даже записывать сообщения, как это делают современные автоответчики, его памяти хватало на хранение тридцати сообщений длительностью по две минуты. Робот мог брать телефон, приносить его хозяину либо совершать звонки самостоятельно по просьбе человека. АРС умел различать мужские и женские голоса, а также реагировал на некоторые голосовые команды. В случае, когда нужный номер был занят, у него запускался процесс автодозвона — АРС набирал номер через каждые три минуты. Когда ему удавалось дозвониться, он передавал телефонную трубку хозяину.
Робот мог позвонить нужному человеку в указанное время, сделать звонок в справочное бюро, вызвать пожарных, скорую помощь (квартира для этого оснащалась специальными датчиками, которые срабатывали при возникновении проблем).
АРС записывал нужные теле- и радиопередачи, включал бытовую технику в нужное время, а также был запрограммирован на включение и выключение света в квартире.
Услышав, что в дверь звонят, АРС открывал ее. И не только впускал людей в дом, но и здоровался с ними, поднимая руку, говорил приветственные слова, проводил в комнату, запускал магнитофон или же телевизор, предлагал напитки, и если гости соглашались, разливал жидкость по стаканам и привозил на сервировочном столике в комнату.
По утрам робот будил хозяина в нужное время, после чего включал магнитофонную запись с утренней гимнастикой, а после нее напоминал, какие дела запланированы на день.
АРС весил почти центнер, однако его мог легко собрать и разобрать всего один человек буквально за несколько минут, так как конструкция представляла собой отдельные модульные блоки с разъемами. Для движений робота применялось 13 различных электромоторов, самые сложные функции выполняла рука, она могла взять бутылку, налить дозировано содержимое в стакан и подать его гостю. За все эти действия отвечала электромеханика (устройство программно-временного типа, снабженное датчиками обратной связи). Для записи сообщений и общения с людьми АРС использовал сразу два магнитофона. Стандартный бобинный 6-миллиметровый магнитофон записывал входящие телефонные звонки, а магнитофон с 18-миллиметровой лентой со специально разработанным Гришиным лентопротяжным механизмом воспроизводил речь самого робота.
АРС был оснащен специальным столиком для телефонного аппарата, который имел оригинальную конструкцию, позволявшую роботу набирать требуемый номер. С другой стороны корпуса находился выдвижной стол, на который ставились бутылки, бокалы и кружки.
Хотя Гришин не выиграл конкурс «Техники — молодежи» 1967 года, его подопечный был удостоен почетного диплома как один из самых сложных роботов. Главное, что АРС, в отличие от своих собратьев, не канул в бездну времени, им и сегодня можно полюбоваться — робот находится в Государственном музее истории космонавтики Калуги.

Интересно, что одним из членов жюри конкурса был легендарный советский робототехник, кандидат технических наук Вадим Викторович Мацкевич (1920–2013), который в 1936 году, еще будучи школьником, сконструировал робота В2М 2, отправленного на Всемирную выставку в Париж. Жизнь Вадима Мацкевича заслуживает не только внимательного рассмотрения, но и как минимум хорошей биографии в серии ЖЗЛ. Дело в том, что это был настоящий отечественный самородок, — иначе как объяснить тот факт, что обычный школьник, увлекавшийся с семилетнего возраста электроникой, в двенадцать лет на станции юных техников Ростова-на-Дону сделал полутораметровый радиоуправляемый броневичок, стрелявший фейерверками? А спустя четыре года Вадим после просмотра забытого ныне советского фантастического фильма «Гибель сенсации» (1935) вдохновился на создание робота, который умел поднимать правую руку немного выше уровня плеча. Мацкевич смог раздобыть ящик белой жести и десяток шведских подшипников на областной станции юных техников, затем за несколько месяцев он сделал голову и кисти рук робота, а тележки для ступней металлического истукана ему помог изготовить токарь из мастерской Новочеркасского политехнического института. Робот ростом 1,2 м управлялся по радио с помощью искрового передатчика и выполнял восемь команд. Устройство заметили и отправили на Всемирную выставку в Париж, где с роботом сфотографировались нацисты— они вместе с металлическим истуканом вскидывали руку в известном приветствии. Мацкевич закончил школу, поступил в МЭИ на факультет автоматики и телемеханики, затем участвовал в войне, работал испытателем авиационной техники, а потом взял шефство над Щёлковской станцией юных техников и большую часть своего свободного времени занимался с ребятами, написав также несколько пособий по робототехнике и радиоэлектронике.


Среди роботов Мацкевича и его подопечных выделялись еще два металлических красавца. В 1959 году перед павильоном «Электрификация» на ВДНХ была сооружена специальная эстрада, на которой каждые два часа выступал 180-сантиметровый робот Вадима Викторовича, выполнявший 18 команд оператора, передаваемых по радиосвязи. Механическое чудовище также могло «отвечать» на вопросы удивленной публики, правда, за него по радио говорили подопечные Мацкевича, и порой ребята «искрометно» шутили. Так, робот непринужденно похвалялся, что пьет водку ведрами. Впрочем, что удивляться, ведь это был русский робот.


В 1970 году ребята под руководством Мацкевича собрали уже робота ростом 2,6 м, который весил 220 кг, но при этом мог ходить, двигать руками и головой, танцевать, был даже оснащен «светомузыкой». Когда робот-меломан «слышал» музыку, на его экране появлялся красочный цветочный фейерверк. Он также управлялся по радио и выполнял уже 27 команд. Этот робот был оснащен простейшей ЭВМ и выглядел довольно эффектно. В правой руке он сжимал «пылающий» факел, вместо зубов сияли красные лампочки, загорающиеся в такт с речью, а глаза переливались то синим, то зеленым. Металлический «Прометей» был презентован на ВДНХ и так понравился представителям Министерства просвещения, что его забрали в Осаку (Япония) на Всемирную выставку ЭКСПО-70.
Спустя всего пару лет после первого конкурса журнал «Техника — молодежи» в августовском номере за 1971 год дал старт второму, который назвался «71-Робот-72». Как нетрудно догадаться из его названия, подача работов на заочный конкурс завершалась в декабре 1972 года. Однако теперь принимались не только схемы, фотографии, слайды и описания роботов, но и научно-фантастические рассказы и статьи.
Конкурс вызвал еще большее оживление в рядах читателей журнала. В мартовском номере за 1973 год жюри конкурса подвело итоги, опубликовав фотографии сразу десяти новых роботов и кратко рассказав о каждом из них. Победителем стал уже знакомый нам АРС Бориса Гришина, который теперь не только помогал своему хозяину ухаживать за мамой, но и занимался с его маленькой дочкой.
Среди участников конкурса «засветился» и робот «Сибиряк-3», внук «Сибиряка-1» и сын «Сибиряка-2». Обновленная версия омского робота получила программный блок в виде набора дисков с кулачковыми замыкателями. Программист устанавливал диски под необходимыми углами, нажимал кнопку «Пуск», диски начинали медленно вращаться, и робот оживал. «Сибиряк-3», в отличие от своих предков, не раздавал билеты или карточки, он был занят сугубо важным делом — демонстрацией экспонатов выставки.
Великолепного робота — Деда Мороза под названием ЮТ — представили ребята из технического кружка при ЖКО ВНИИ неорганических материалов во время новогоднего мероприятия. ЮТ, выполненный из алюминиевых уголков и кровельного железа, ловко двигался по сцене, шевелил «губами» в такт произносимым словам и жестикулировал. Управлялся он с помощью кабеля, который тянулся за ним и прятался в складках костюма Деда Мороза. Говорил за робота оператор с пультом, скрывавшийся за кулисами. Он «подслушивал» вопросы зрителей и отвечал на них через микрофон, а ЮТ транслировал его голос через электродинамический громкоговоритель, вмонтированный в туловище. С пульта также можно было управлять движением губ и глаз робота. Сердце металлического Деда Мороза заменял электродвигатель постоянного тока, допускающий реверсирование. От него шли передатчики к рукам и ногам, а также к механизму поворота головы. Для шевеления губ юные инженеры применили электромагнитное реле с возвратной пружиной. На снимках, опубликованных в журнале «Техника — молодежи», робот ЮТ представлен как в своей первозданной форме, так и в новогоднем костюме, в котором он выглядит весьма привлекательно, — это вам не сумасшедший робот-злодей Санта из «Футурамы».
Забавного робота сконструировали ребята из Днепродзержинска (сегодня город Каменское, Украина) под руководством бывшего преподавателя радиотехники Николая Ивановича Коренного. Его назвали «Малыш», хотя стальной человек почти метрового роста выглядел довольно внушительно, особенно когда реагировал на людей, поворачивая голову в их сторону. Он это делал, когда кто-либо звал его по имени. «Малыш» — непростой робот, в его небольшом теле были заключены шесть двигателей, 32 транзистора, девять реле, четыре фотосопротивления и два фотодиода плюс приемник, работающий на частоте 27 МГц. «Малыш» был вполне автономным, у него имелся собственный источник питания — аккумулятор напряжением 24 В, энергии которого хватало на 24 часа непрерывной работы «Малыша». На двух дорожках ленты портативного магнитофона была записана речь робота. Он мог изложить свою автобиографию и ответить на несколько запрограммированных вопросов.
Еще одного небольшого, но умного робота-экскурсовода по имени РЭМ создали умельцы из ПТУ № 9 города Каменск-Уральский (Свердловская область) для павильона «Профтехобразование» на ВДНХ. Ходовая часть РЭМа была довольно оригинально спроектирована. Она представляла собой систему шарнирно соединенных тяг и рычагов, позволяющую роботу быстро передвигаться, выкидывая вперед попеременно ноги и руки. РЭМ словно маршировал, а с помощью реверса двигателей мог разворачиваться на месте. РЭМ был довольно строгим лектором — как только уровень шума в его ушах-микрофонах превышал пороговый, металлический гид прекращал свой рассказ, включалось реле правого микрофона и он произносил сакраментальную фразу: «Извините, здесь нельзя шуметь». Кроме того, робот был оснащен контактными датчиками, поэтому, когда его задевали, РЭМ предупреждал: «Меня трогать нельзя!». Кажется, что робот был довольно суровым, однако это не так: его конструкторы наделили РЭМа способностью танцевать с помощью специальной программы.
Было достаточно поставить его внутрь специального кольцевого барьера и запустить музыку: робот начинал двигаться, размахивать руками, а на экране, находящемся на его груди, переливались все цвета радуги.
Ну и на сладкое. Перед вами и читателями журнала «Техника — молодежи» предстал БУКА. Нет, бояться не стоит, это довольно милый и умный робот, чье ужасающее имя расшифровывается довольно просто: Блок универсальной квартирной автоматики. Его сконструировал и построил инженер Смоленского машиностроительного завода Иосиф Тормозов. БУКА, который выглядел человекоподобным роботом, по сути содержал в своей основе пару программируемых реле времени (электромеханическое для выдержек от 5 до 70 минут и от 20 до 270 минут, и электронное — от двух секунд до одной минуты), они управляли работой разного рода аппаратуры — приемника, телевизора, магнитофона, электроплитки, стиральной машины и т. п. Однако возможности робота этим не ограничивались. Он прекрасно справлялся и с ролью автоматического секретаря, так как умел отвечать на телефонные звонки, записывать оставленные сообщения, реагировать на звонки в дверь.
Помимо реле, в конструкцию входил переделанный магнитофон «Днепр-11» и соленоид с телефонным аппаратом. В магнитофоне было две ленты, на одной содержался текст ответа на телефонный звонок, а на другую записывалась речь абонента. Робот в этом случае работал как стандартный автоответчик, сообщая звонившему о том, что хозяина нет дома и следует оставить ему сообщение — на это отводилось 20 секунд.
Единственным его недостатком была неподвижность, однако она искупалась обширными возможностями, которыми обладал БУКА, подключенный ко всей аппаратуре квартиры.
А теперь давайте помечтаем о том, как бы изменилась жизнь, если бы уже в 1970-е годы в массовое производство отправились роботы типа АРСа и БУКи.
Ранее утро, будильник неумолимо отсчитывает последние секунды, по его сигналу автоматика робота подключает к сети электроплитку — на ней сковорода с завтраком и чайник. Спустя пару минут включается радио, и вы просыпаетесь под звуки музыки. Затем встаете, умываетесь, может быть, делаете зарядку, завтрак уже разогрет, чайник вскипел, а плитка автоматически отключена. Робот рассказывает о делах, запланированных на сегодня. А вечером, когда вы вернулись с работы или учебы, «умный дом» сообщает о телефонных звонках или включает записанную радиопередачу. Красота!
Александр Речкин

 (5 оценок, среднее: 4,60 из 5)
(5 оценок, среднее: 4,60 из 5)