

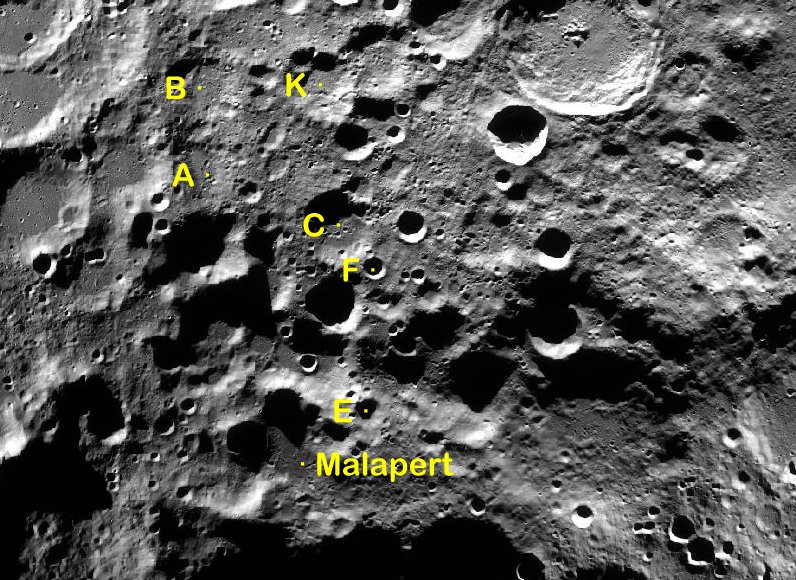
15 февраля 2024 года ракета-носитель Falcon 9 (в своей самой легкой версии, RTLS) вывела на прямую траекторию к Луне посадочный модуль «Одиссей» из серии Nova-C от частной компании Intuitive Machines. Через неделю, 22 февраля, аппарат прилунился у приполярного кратера Малаперт и передал на Землю фотографии, телеметрию и прочие данные. Тем не менее в процессе полета произошло множество досадных инцидентов, а при самой посадке подломилась одна из посадочных опор, в результате чего «Одиссей» опрокинулся набок. В результате этого мнения по поводу успешности миссии оказались прямо противоположными: одни (включая администратора NASA Билла Нельсона) считают ее «безусловным успехом», другие — «позорным провалом». Попробуем разобраться в том, что известно на текущий момент.
Истоки
Компанию Intuitive Machines основали выходцы из NASA, в частности, из закрытого Project Morpheus. Они одними из первых делали двигательные установки космических аппаратов на жидком метане с кислородом (сокр. methalox) и проводили многочисленные прыжковые испытания в 2013–2014 годах. Эти ДУ пришли из закрывшегося к тому времени стартапа Armadillo Aerospace, который участвовал в конкурсе Northrop Grumman Lunar Lander X-Prize и занял там второе место. Сами сотрудники Intuitive Machines позже участвовали (хоть и не на первых ролях) в намного более громком Google Lunar X-Prize, наряду с почти всеми их теперешними конкурентами.
Из Project Morpheus пришел один из трех сооснователей Intuitive Machines, ставший техническим директором (СТО) — Тим Крейн. Генеральным же директором (СЕО) стал Стив Альтемус — бывший замглавы Космического центра имени Линдона Джонсона NASA. Владельцем же и основным источником финансирования стал миллиардер Кам Гаффарян, бывший работник NASA, Lockheed Martin и Ford Aerospace, основавший множество космических и инновационных компаний, в том числе и такие известнейшие, как Axiom Space.
Программа
Программа NASA Commercial Lunar Payload Services (CLPS, произносится «клипс») была обнародована в 2018 году, сразу после отмены миссии «классического» лунохода Resource Prospector и под влиянием явного успеха программы CRS по доставке грузов на МКС частными компаниями. В ней задействовано множество частных компаний, проектирующих корабли, а NASA играет роль «агрегатора такси», а также одного из клиентов.
Идеология программы, многократно озвученная ее главным сторонником, тогдашним главой научного отдела NASA Томасом Зурбухеном, в том, чтоб внести в межпланетные миссии принципы NewSpace, испытывая аппараты в железе, и быть терпимыми к ненулевому проценту неудачных миссий с целью их удешевления и увеличения их числа и скорости разработки.
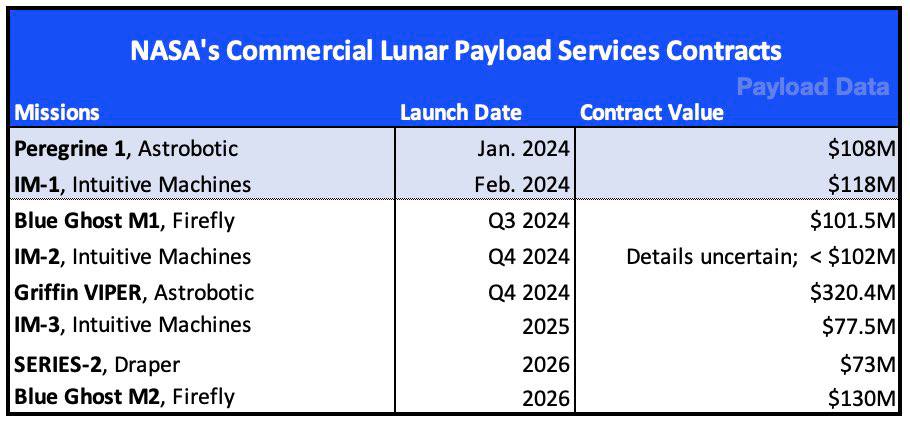
На данный момент заключены девять контрактов с четырьмя компаниями, три из которых уже успели запустить свой лунник и детально протестировать его в космосе на пути к Луне. Стоит обратить особое внимание на VIPER — это по сути реинкарнация того же лунохода Resource Prospector, с которого всё и начиналось, его необходимо оснастить буром и искать воду в затененных областях в окрестностях южного полюса. Этот бур предварительно должен пройти стационарные испытания в рамках Intuitive Machines Mission 2.
Но так как две предыдущие попытки — Hakuto-R японско-европейской компании iSpace, участвующей в программе через американского партнера Draper, и Peregrine компании Astrobotic — несмотря на отдельные позитивные моменты и космические испытания всё же не сумели мягко сесть на Луну, основное внимание оказалось сосредоточено на попытке Intuitive Machines.
Лендер
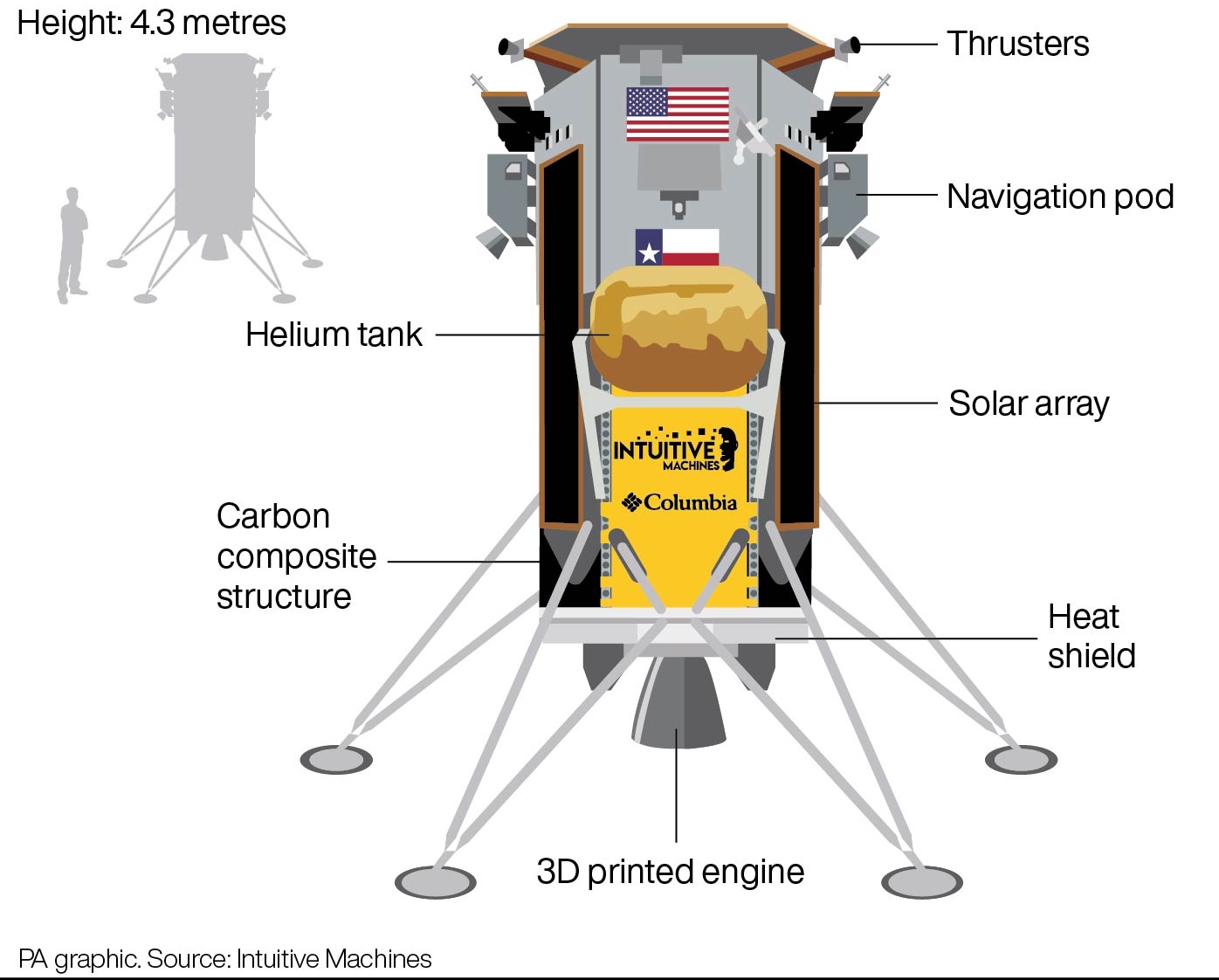
Посадочный модуль Nova-C вышел крупнее и массивнее аналогов:
- высота: 4,3 м;
- размер опор: 4,6 м, ограничен обтекателем Falcon 9;
- масса при запуске: 1930 кг (ограничена грузоподъемностью Falcon 9 RTLS), из них 845 кг кислорода, 422 кг метана, и 17 кг гелия;
- масса полезной нагрузки: до 130 кг — отсюда и название серии (римская цифра С = 100).
Стоит обратить внимание на криогенную топливную пару. Несмотря на широчайшее применение криогеники в ракетах-носителях и разгонных блоках, из-за склонности к испарению ее очень сложно использовать в долгоживущих космических аппаратах. Предыдущие планы (например, Н1-Л3, «Буран», ACES) по разным причинам не дошли до серии. Хотя сейчас ситуация, возможно, меняется: на ближайшие годы есть много планов и на крупные корабли (Starship, Blue Moon), и на разгонные блоки (Helios), и на заправочные станции (LOXSat).
Тем не менее испарения все-таки ограничивают время полета и не позволяют использовать ни многоимпульсные схемы ни многомесячные баллистические траектории, ставшие «модными» в последние годы. Траектория в результате получается короткой и простой, как у Apollo: прямой запуск к Луне, торможение сразу на низкую круговую орбиту и в течении суток посадка. Это всё несколько менее выгодно по delta-V и требует больше мощности двигателей, чем у альтернативных траекторий, но высокие показатели по удельному импульсу данной топливной пары всё равно позволяют добиться отличного соотношения начальной массы и массы полезной нагрузки.
Полезная нагрузка
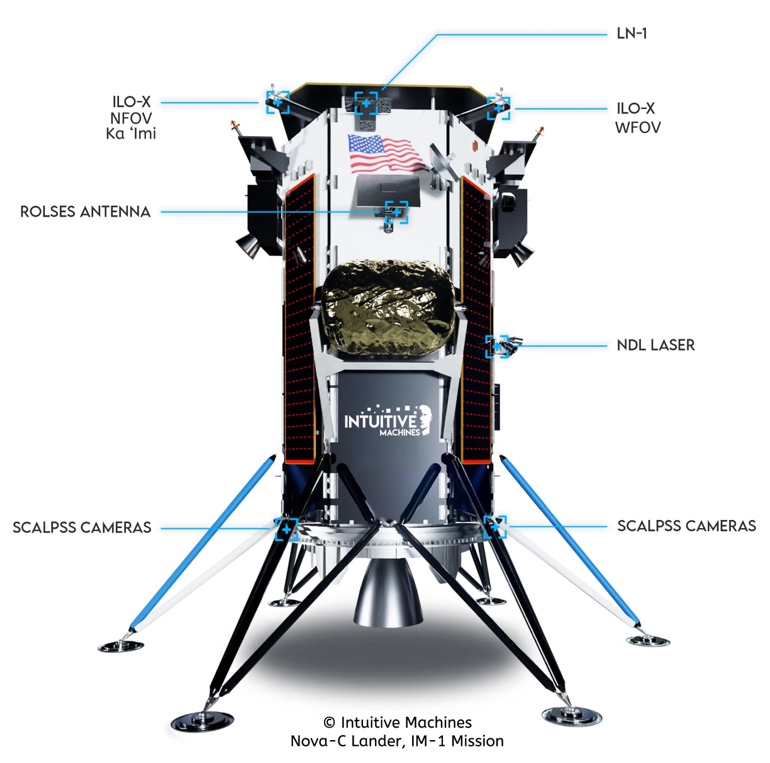
Хотя основной целью первой миссии Intuitive Machines были испытания самого лендера, на него всё же решено было поставить двенадцать единиц научной и коммерческой нагрузки.
От NASA:
- ROLSES: мини-радиотелескоп для изучения плазмы у поверхности Луны и ее влияния на приповерхностную радиоэнергетическую среду и получающиеся радиошумы;
- LRA: набор из восьми пассивных ретро-рефлекторов для уточнения местоположения лунных орбитальных аппаратов или расстояния Земля — Луна;
- NDL: три альтиметра для точного определения высоты и скорости относительно поверхности;
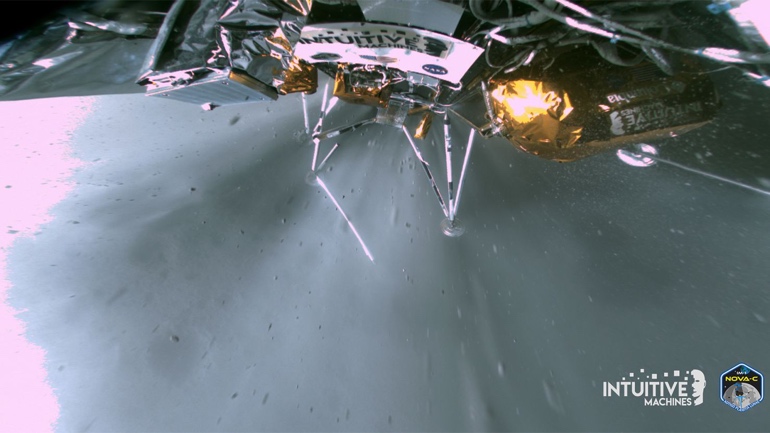
- SCALPSS: стереокамера для фотографирования эффекта струи газов от двигательной установки аппарата на лунную пыль в процессе посадки;
- LN-1: радиомаяк для лучшей ориентации будущих лендеров;
- RFMG: радар, точно измеряющий количество топлива в кислородном и метановом баках.
От других (частных) клиентов:
- Columbia Sportswear: тест, могут ли элементы изоляции спортивного костюма заменить внешний слой термальной изоляции криогенных баков в космосе;
- ILO-X: микро-телескоп, прототип будущей более крупной лунной обсерватории;
- EagleCam: кубсат, который должен был «выстрелить» во время посадки и сфотографировать «Одиссея» со стороны;
- MoonPhases: 125 миниатюрных скульптур из нержавеющей стали в честь людей, которым принадлежат значительные достижения в мировой истории;
- LunaPrize: «Википедия» и другие общечеловеческие данные, записанные на диске со сроком годности в миллиард лет;
- LoneStar: прототип лунного хранилища данных с функциями считывания и записи с Земли.
Полет
Начало полета проходило с прямой трансляцией телеметрии и видео по типичной схеме: вывод на низкую околоземную орбиту, часть витка по ней и второе включение двигателя MVac, переводящее верхнюю ступень с прикрепленным аппаратом на транслунную траекторию с его последующим отделением.

После отделения космического аппарата обычно в течении часа приходит подтверждение, что он вышел на связь и работоспособен. Но на этот раз такое сообщение пришло только через несколько часов, и следящие за полетом изрядно волновались за судьбу аппарата. И, как выяснилось уже после посадки, волновались не зря: звездные датчики, призванные определять ориентацию аппарата, не работали: аппарат вращался и солнечные панели не смотрели на солнце. Операторы в ЦУПе сумели диагностировать проблему и перезагрузить датчики всего за три часа до того, как закончился заряд у аккумуляторов.

В продолжении полета дело пошло лучше: с аппарата передали замечательные фото Земли, было произведено успешное испытание криогенной двигательной установки, произведены две коррекции курса (от третьей решили отказаться), и всё было готово к ключевому маневру: переходу на орбиту Луны (LOI). И он состоялся: по сообщению компании, данный маневр изменил скорость аппарата на 800 м/с и был выполнен с большой точностью (погрешность около 2 м/с), выведя аппарат на круговую полярную орбиту около Луны высотой в 92 км (при запланированных ста).
Но потом начались непонятные моменты. Назначенное время посадки два раза сдвигалось — сначала на час вперед, потом на два часа назад. Во второй раз объявили причину: альтиметр (прибор по определению расстояний, необходимый для посадки) лендера не работал, так как перед запуском его не установили в рабочее положение специальным тросиком, и в авральном порядке навигационный компьютер был переключен на другой альтиметр, от NASA (NDL в списке полезной нагрузки), летевший для испытаний, без планов его использовать для самой посадки. Как позже выяснилось, экстренная перенастройка не сработала: из-за невыставленной переменной в программе компьютер перестал принимать значения расстояния на высоте в 15 км, и в результате почти вся посадка шла без этой, критически важной, информации.
Как выяснилось позже, программная оценка высоты, по картинке, была с ошибкой примерно в 100 м, это и привело к тому, что в момент касания была непогашенная вертикальная скорость 10 км/ч (это гораздо выше запланированных трех), но еще хуже — совершенно незапланированные 3 км/ч горизонтальной скорости. В результате лендер «запрыгал» на неровной поверхности, в процессе чего у него подломилась одна из «ножек», и при выключении двигателя он мягко осел на бок, до угла в 30° от горизонтального.
Работа на поверхности и передача данных
В первые десять минут в Центре управления полетом Intuitive Machines в Хьюстоне (и в прямой трансляции из него) царила напряженная тишина — сигналов с аппарата не было, все боялись, что он разбился или повредил антенны — это поставило бы крест на миссии и не позволило бы получить никакие данные. Но через 15 минут радиостанция в Германии таки сумела поймать слабый сигнал. Через несколько часов настал черед более крупной антенны в Австралии, потом инженеры Intuitive Machines поняли, что из четырех антенн аппарата две направлены в сторону лунной поверхности, и это сильно меняет характеристики сигнала с них. После необходимых изменений и подбора параметров связи сигнал стал более стабильным, и инженеры смогли получить телеметрию аппарата, фото с его навигационных камер и информацию от полезных нагрузок.

Что касается самой наглядной из них — отстреливаемого EagleCam, — то команда ожидаемо не была подана перед посадкой из-за сложностей с определением высоты. Тем не менее группа разработчиков смогла проверить его действие на Луне, внутри пускового контейнера, и протестировать вибрационный механизм очистки линз от пыли. За полдня до конца работы лендера (см. ниже) EagleCam был таки отстрелен, на 4 м вбок, но данных с него не поступило. На данный момент неизвестно, что именно стало причиной неполадки.
Из трех солнечных панелей на аппарате только одна-две смотрели в сторону солнца — притом, что самая большая, которая должна была быть сверху аппарата, оказалась расположена так, что не видела солнце вовсе. В результате аппарат получал 170 ватт энергии при необходимых для полноценной работы 210. Было принято решение продолжить работу в полном объеме, даже если из-за этого придется завершить ее пораньше. В итоге последний сеанс связи состоялся 29 февраля, после чего аппарат переведен в спящий режим.
Продолжение
Несмотря на то, что основная фаза Intuitive Machines Mission 1 уже завершена, многое насчет нее может прояснится только впоследствии:
- Оживет ли аппарат после лунной ночи? Шанс на это представится около 17–18 марта, когда солнце встанет с направления большой верхней панели.
- Результаты обработки научных данных — когда появятся написанные по ним научные статьи, сколько их будет, в каких журналах, наконец, насколько интересными они окажутся.
- Расследование причин неудач — в случае, если данные, полученные каким-то из инструментов, окажутся бесполезными, нужно выясниить, в чем именно проблема и насколько просто ее решить к следующему испытанию схожего прибора.
- Насколько отложится следующий полет IM-2 (на момент написания этих строк он запланирован на конец 2024 года), и окажется ли он успешным? Основным инструментом тогда окажется буровое устройство PRIME-1, а для этого, скорее всего, необходимо сесть в запланированной ориентации.
Достижения и неудачи
Несмотря на то, что остались еще вопросы (см. предыдущую часть), многое уже известно и можно подвести итоги. Перечислим здесь как основные достижения миссии, так и негативные моменты (по пресс-релизам самой компании, критике в СМИ и отзывам профессиональных экспертов).
Достижения:
- Подтверждена работоспособность первой в истории криогенной (да еще и метановой) двигательной установки для глубокого космоса с множественными включениями.
- Проведены испытания всех элементов лендера (кроме альтиметра) в реальных рабочих условиях, в том числе неноминальных, с получением подробной телеметрии о всех этапах их работы.
- Навигация успешно привела к назначенной точке на поверхности Луны. Достигнутая точность в 1,5 км хоть и меньше запланированной, но всё равно очень неплоха по стандартам лунных беспилотных посадок.
- Первая мягкая посадка в истории в окрестностях южного полюса Луны — около 80-й параллели. Предыдущий рекорд у Индии полгода назад — около 70-й, в два раза дальше.
- Работа на поверхности на протяжении более 144 часов и передача на Землю 350 мегабайт данных от всех полезных нагрузок.
- Первая лунная посадка частной компании, первая по контракту с фиксированной ценой и первая по программе CLPS.
- Первая лунная посадка под эгидой NASA за 52 года — после «Аполлона-17».
- Агентство NASA, являющееся главным клиентом и заказчиком миссии IM-1, объявило ее «безусловным успехом».
Неудачи:
- В процессе посадки не сработали как главный альтиметр, так и резервный.
- Посадка произошла с большей, чем расчетная, скоростью, с меньшей, чем расчетная, точностью посадки, на место со слишком крутым уровнем наклона.
- Получившееся едва ли не горизонтальным положение сказалось на электропитании, связи, количестве и качестве полученных данных. Например, телескоп ILO-X не был направлен на небо и удовлетворился съемками поверхности Луны и отломившейся опоры.
- Ни одна группа разработчиков инструментов полезной нагрузки пока не отчиталась о громком успехе и достижении поставленных целей. С другой стороны, пока нет и подтверждения неудач ни одного из приборов и ответственности лендера в ней.
Международная панорама
В последний год были две успешные посадки на Луну — индийской «Чандраян-3» и японской SLIM — и три неуспешные: японской частной Hakuto-R1, российской «Луны-25» и американской частной Peregrine. В этом году ожидается полет крупной китайской «Чанъэ-6» c возвратом грунта с дальней стороны Луны. Следом запланированы сразу несколько миссий по программе CLPS, перечисленные в таблице выше, и вторая миссия iSpace — Hakuto-R2. Также не стоит сбрасывать со счетов двух «грандов» — SpaceX и Blue Origin, которые намереваются в течении 2025 года произвести демонстрационные посадки своих огромных лендеров, пока в беспилотных версиях.
Хотя вряд ли кто-то удивится, если большинство вышеуказанных сроков сдвинутся вправо, будем лишь надеяться, что всё же ненамного.
Андрей Колин, MSc, выпускник International Space University, системный инженер космических аппаратов

 (4 оценок, среднее: 4,50 из 5)
(4 оценок, среднее: 4,50 из 5)
Заметка понравилась, — и по содержанию и по стилю.
Похоже, клубы лунной пыли, взметаемые двигателем модуля — серьёзная помеха прилунению.
Скорее всего, пылевое облако наэлектризованное…
К тому же, наверное, при вертикальной посадке модуль окутывается ещё и облаком продуктов сгорания топлива — это CO2 и Н2О…
Интересно было бы узнать мнение специалиста о проблемах мягкого прилунения.
Вот красивое видео «прилунения» «Одиссея» из Хьюстона на земном полигоне.
29мар2024: NASA выбрало 12 команд-финалистов из студентов и аспирантов вузов США, предложивших инновационные концепции по управлению лунной пылью, которую поднимает реактивный космический корабль при посадке на Луну.
Каждая команда получит стипендию в размере 7000 долларов США для разработки своей концепции и участию в финальном форуме в июне этого года.
Три лучшие команды-победители разделят призовой фонд в размере 18 000 долларов США.
https://www.nasa.gov/general/nasa-names-finalists-to-help-deal-with-dust-in-human-lander-challenge/
Похоже, проблема лунной пыли будет решена до 2026 года и в рамках миссии «Артемида III», запланированной на 2026 год, «NASA войдёт в историю, отправив первых людей для исследования региона вблизи Южного полюса Луны»
https://www.nasa.gov/missions/artemis/artemis-iii/